
Ensenso 3D 작동
AI 레이저 도트 삼각 측량은 어떤 원리로 작동할까요?
구조광으로 3차원 보기
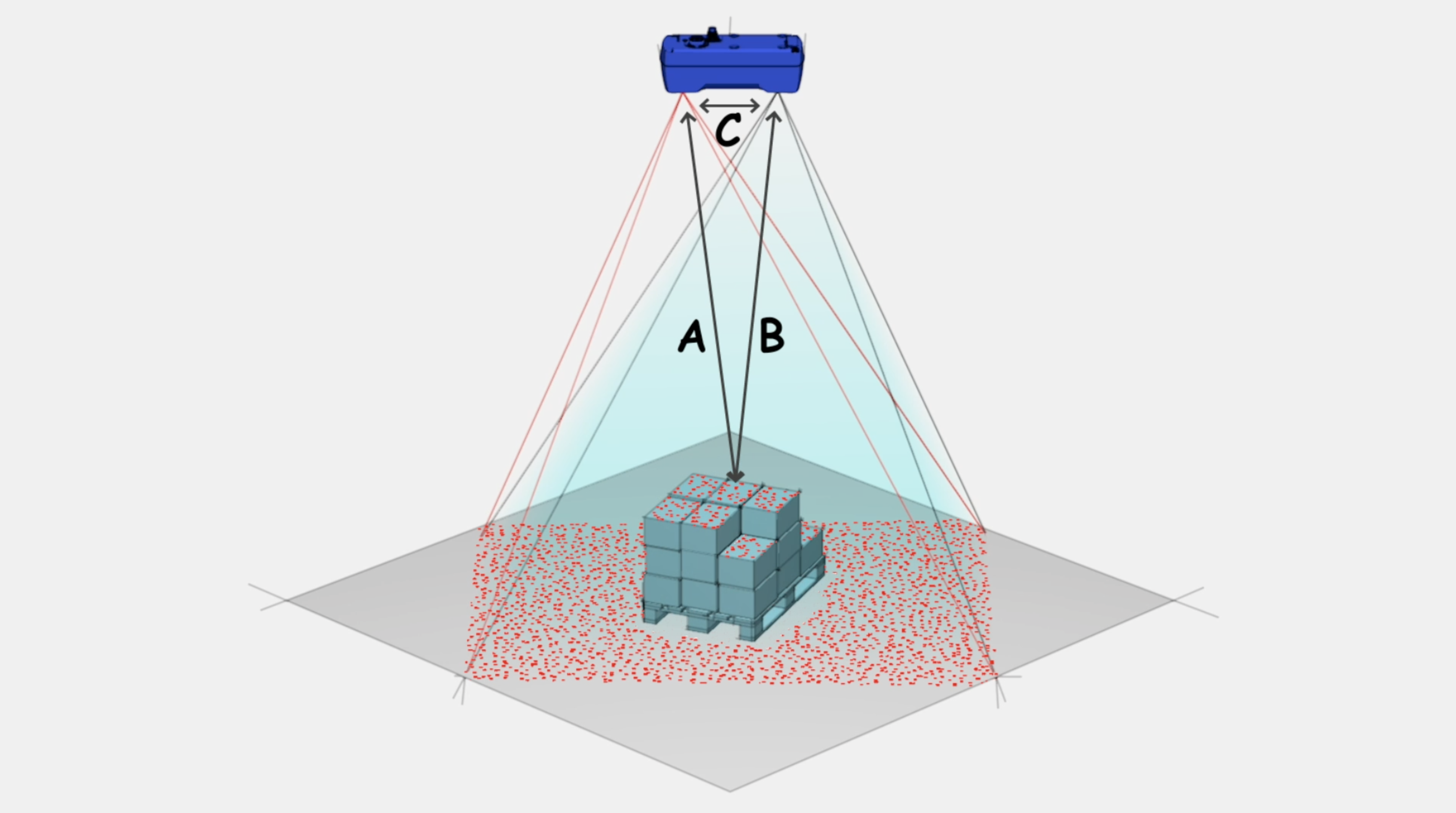
Ensenso S 시리즈 카메라는 구조광에서 작동합니다. 적외선(IR) 레이저는 카메라에 의해 기록되는 약간 다른 위치의 물체 공간에 임의의 도트 패턴을 투영합니다. 이 도트 패턴 이미지는 물체가 빛을 반사하는 지점마다 다릅니다. 레이저 이미지 도트는 광원에서 물체가 얼마나 멀리 떨어져 있는지에 따라 예상 위치에서 벗어납니다. 점 위치의 편차는 깊이 정보의 기초가 됩니다.
레이저 광을 기반으로 하는 3D 방법 LIDAR 또는 ToF(Time of Flight)와 달리 캡처된 각 투영 지점의 공간 깊이와 포인트 클라우드의 공간 깊이는 광 지연 측정이 아니라 Ensenso 스테레오 비전 카메라에 사용되는 삼각 측량에서 비롯됩니다.
계산은 스테레오 비전에서와 같이 두 가지 시야각에서 발생하는 레이저 포인트 위치의 편차(="disparity")를 기반으로 합니다. 그러나 Ensenso S와 같은 3D 방식은 하나의 카메라로 물체 공간을 기록할 뿐입니다. 어떻게 단일 카메라의 투영된 패턴 이미지에서 점의 위치 차이를 추출하는 것이 가능할까요?
프로젝터 자체에서 필요한 정보를 제공합니다. 소위 DOE 투영(회절 광학)은 점 위치가 알려진 고정 "점 이미지"를 생성합니다. 두 점 이미지의 거리와 시야각에 대한 지식을 바탕으로 Ensenso 소프트웨어 삼각 측량 절차는 각각의 레이저 점의 3D 좌표를 결정할 수 있습니다.
구조광
IR 레이저는 고정된 패턴의 밝은 도트를 물체 공간에 투사합니다. 소위 회절 광학(DOE)은 도트 패턴을 생성하는 데 사용됩니다. 미세 구조는 레이저 광의 표적 분할 및 회절을 보장하여 원하는 광 분포가 생성되도록 합니다.
DOE는 빛의 균일한 강도 분포를 가능하게 하고 빔 에너지의 손실이 거의 없이 방출할 수 있도록 합니다. 따라서 협대역 레이저 광과 함께 낮은 주변 조명에서도 대비가 매우 높은 도트 패턴 생성이 가능합니다.
AI 가속 포인트 매칭
삼각 측량을 사용하여 깊이 정보를 계산하려면, 각 투영 지점에 대해 해당 이미지 지점을 먼저 정해야 합니다. 그러나 물체에 대한 빛 반사에 의해 예상되는 점 위치가 이동될 때, 많은 점 중에서 한 점을 식별하는 것은 규칙 기반 이미지 프로세싱 알고리즘에서는 쉽지 않은 도전입니다. 그 해답은 "인공 지능"에 있습니다.
계속 변화하는 개체를 인식하고 분류하기 위해 어떤 기술이 필요할까요? Ensenso 소프트웨어는 카메라 이미지의 점 식별을 위해 사용된 패턴의 기울기와 왜곡으로 사전 훈련된 KNN(인공 신경망)을 사용합니다.
AI 레이저 포인트 삼각 측량의 장점
높은 깊이 정확도
ANN 포인트 매칭의 높은 성공률로 깊이 정확도가 높은, 강력하고 기하학적으로 정확한 3D 데이터
저조도
IR 조명으로 인한 낮은 주변 조명 조건에서 작동
빠른 캡처
하나의 이미지 쌍만 처리되어 빠른 이미지 획득 및 평가 가능

AI 가속
ANN 가속으로 인해 초당 최대 20개의 포인트 클라우드

모션 블러 없음
짧은 노출 시간과 많은 레이저 방출은 모션 블러가 없어 움직이는 물체에 이상적
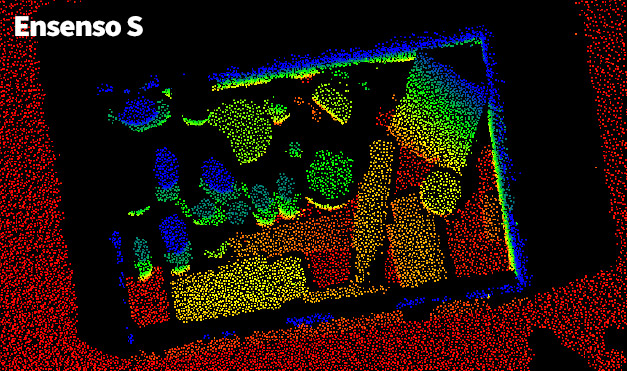
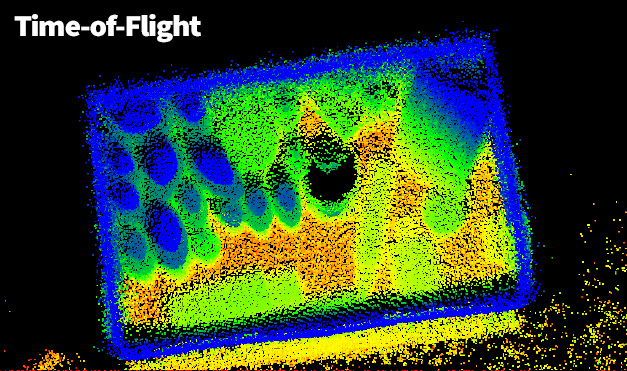
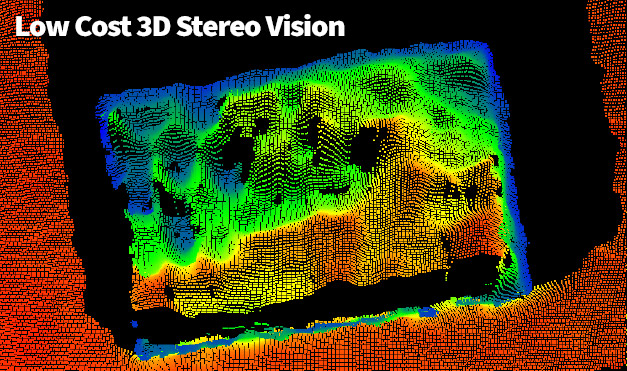
(*) Ensenso S10은 TOF(Time OF Flight) 또는 저렴한 3D 스테레오 비전 기술을 사용하는 3D 카메라에 비해 깊이 정확도가 높아 기하학적으로 정밀한 3D 데이터를 생성합니다.
ENSENSO 선택하기
이제 Ensenso 카메라 선택기를 사용하여 구성 요소를 선택할 수 있습니다. 온라인 환경설정 도구에 매개 변수를 입력하면 어플리케이션에 가장 적합한 조합을 확인할 수 있습니다.


