
코일 크릴의 자동 배치를 위한 자율 주행 로봇 지원 시스템
자동 적재 시스템
인더스트리 4.0으로 시스템과 시설의 디지털화, 자동화 및 네트워킹이 생산 및 물류 분야의 주요한 주제가 되었습니다. 인더스트리 4.0은 더 나은 생산성과 유연성을 위해 프로세스와 워크플로의 최적화를 추구하여 시간과 비용을 절약합니다. 로봇 시스템은 프로세스 자동화의 원동력이 되었습니다. 사물 인터넷(IoT)을 통해 로봇은 점점 더 민감해지고, 자율적이며, 이동성이 향상되었으며, 작동이 쉬워지고 있습니다. 점점 더 그들은 공장과 창고에서 일상적인 도움이 되고 있습니다. 이 부분에서 지능형 이미징 기술의 역할이 점점 더 커지고 있습니다.
자동화 및 지능화된 생산 환경에 대한 수요를 충족하기 위해 독일 Bavaria주, Naila에 위치한 ONTEC Automation GmbH사는 자율 주행 로봇 지원 시스템을 개발했습니다. "스마트 로봇 어시스턴트"는 이동성과 자동화의 시너지 효과를 활용합니다. 강력하고 효율적인 내부 물류 플랫폼, 유연한 로봇 암 및 IDS Imaging Development Systems GmbH의 Ensenso N 시리즈의 강력한 3D 스테레오 카메라 시스템으로 구성됩니다.
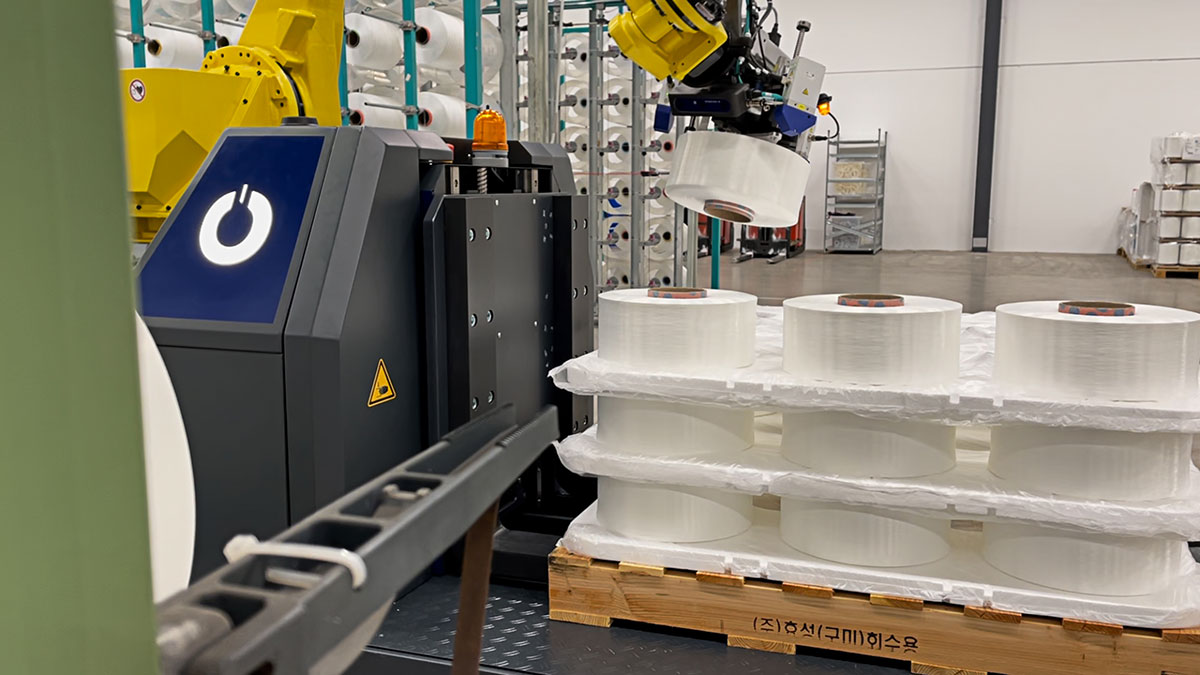
이 솔루션은 단조롭고 무게가 무거운 설정 및 배치 작업 등 다양한 용도로 활용할 수 있습니다. 자율 운송 시스템은 최대 하중이 1,200kg인 다양한 크기의 메쉬 팔레트뿐만 아니라 컨테이너 또는 산업용 유로 팔레트의 floor-level 리프팅에 적합합니다. 섬유 산업에서는 AGV(Automated Guided Vehicle)가 코일 크릴의 자동 적재에 사용됩니다. 이를 위해 원사 스풀이 있는 팔레트를 픽업하여 지정된 크릴로 운송하고 추가 처리를 위해 적재합니다. 특별히 개발된 그리퍼 시스템을 사용하여 8시간 교대당 최대 1000개의 원사 패키지를 픽업하여 크릴의 맨드릴에 밀어 넣습니다. 코일의 크기 및 위치는 그리퍼 암에 설치된 Ensenso 3D 카메라(N45 시리즈)로 캡처됩니다.
어플리케이션
산업용 원사 스풀이 적재된 팔레트는 사전 정의된 보관 장소의 바닥에서 픽업되어 크릴이 위치한 곳으로 운송됩니다. 그곳에서 그리퍼는 팔레트 위에 수직으로 위치합니다. 내부 소프트웨어 ONTEC SPSComm에 의해 트리거되는 이미지 트리거가 Ensenso 3D N45 카메라로 전송됩니다. 차량의 PLC와 네트워크를 형성하여 데이터를 읽고 전달할 수 있습니다. 이 어플리케이션에서 SPSComm은 차량의 소프트웨어 부품, 그리퍼 및 카메라 간의 통신을 제어합니다. 이런 식으로 카메라는 차량과 그래버가 언제 사진을 찍을 위치에 있는지 알 수 있습니다. 이것은 이미지를 찍고 포인트 클라우드를 로봇에 팔레트의 코일 좌표를 보고하는 표준 HALCON 소프트웨어 기반 ONTEC 소프트웨어 솔루션으로 전달합니다. 그 다음, 로봇은 코일을 정확하게 집어 다음 프로세스를 실행합니다. 그리퍼가 원사 스풀 층을 치우면, Ensenso 카메라는 원사 스풀 사이에 있는 포장 재료의 사진을 찍고 포인트 클라우드를 제공합니다. 이러한 포인트 클라우드는 니들 그리퍼가 중간 층을 치우는 정보를 로봇에 제공하기 위해 유사하게 처리됩니다. ONTEC의 소프트웨어 개발자인 Tim Böckel은 "이 접근 방식은 팔레트의 층 수와 마감 패턴을 미리 정의할 필요가 없으며, 불완전한 팔레트도 문제 없이 처리가 가능함을 의미합니다."라고 설명합니다. "니들 그리퍼를 사용하기 위해 그리퍼를 변환할 필요가 없습니다. 이 어플리케이션에는 코일을 위한 일반 그립 부품과 중간 층을 위한 니들 그립 부품이 있습니다."
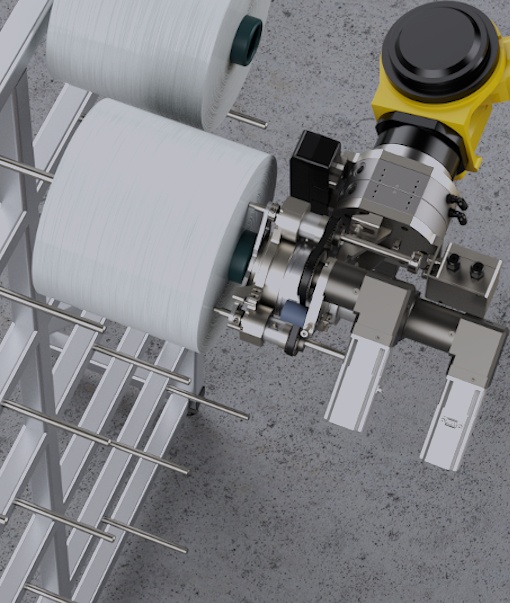
이 작업을 위해 로봇 암에서 움직이거나 정지된 물체의 3D 획득이 가능한 컴팩트한 Ensenso 3D 카메라가 적합합니다. Ensenso N 45의 3D 스테레오 전자 장치는 하우징에서 완전히 분리되어 경량 플라스틱 합성물 하우징을 사용할 수 있습니다. 무게가 가벼워 스마트 로봇 어시스턴트와 같은 로봇 암에 쉽게 사용할 수 있습니다. 이 카메라는 까다로운 환경 조건에서도 사용할 수 있습니다. "이 어플리케이션의 주된 어려움은 여러 곳의 복도와 방에 시간에 따른 다양한 조명 조건입니다." 라고 Tim Böckel은 설명합니다. 어려운 조명 조건에서도 통합 프로젝터는 임의의 도트 패턴이 있는 패턴 마스크를 사용하여 이미지화 할 대상에 고대비 텍스처를 투사하고, 이렇게 하여 특징이 없는 균질한 표면의 구조를 보완합니다. 이는 통합 카메라가 요구 사항을 정확히 충족함을 의미합니다. "NxView 내에서 사전 구성함으로써 작업이 잘 해결되었습니다." 소스 코드가 포함된 이 샘플 프로그램은 이미지 및 깊이 데이터가 시각화된 하나 이상의 스테레오 및 컬러 카메라를 여는 데 사용할 수 있는 NxLib 라이브러리의 주요 기능을 보여줍니다. 노출 시간, 비닝, AOI 및 깊이 측정 범위와 같은 매개변수는 사용된 매칭 방법에 대해 실시간으로 조정 가능합니다.
매칭 프로세스를 통해 Ensenso 3D 카메라는 표면에 투영된 보조 구조를 통해 위치 변경을 포함한 매우 많은 수의 픽셀을 인식하고, 이로부터 장면의 완전하고 균일한 깊이 정보를 생성할 수 있습니다. 이것은 차례로 스마트 로봇 어시스턴트가 진행하는 데 필요한 정밀도를 보장합니다. 카메라의 다른 선택 기준은 무엇보다도 표준 비전 인터페이스 기가비트 이더넷과 글로벌 셔터 1.3 MP 센서였습니다. "카메라는 더 빠른 처리 시간을 위해 전체 팔레트의 한 쌍의 이미지만 찍지만, 로봇 암이 정확하게 잡을 수 있도록 밀리미터 범위의 정확도로 비교적 먼 거리의 좌표를 제공해야 합니다."라고 ONTEC의 어플리케이션 개발 IT 전문가 Matthias Hofmann은 설명합니다. "따라서 3D 카메라로 코일의 가장자리를 안전하게 기록할 수 있도록 고해상도가 필요합니다." 스풀 중심에서 그리퍼까지 위치를 가능한 정확하게 전달할 수 있으려면 가장자리의 위치를 파악하는 것이 중요합니다.
또한 이 카메라는 열악한 환경 조건에서도 사용 가능하도록 특별히 설계되었습니다. 트리거 및 플래시용 나사식 GPIO 커넥터가 있으며, IP65/67 보호 등급으로 먼지, 물 또는 세제 등으로부터 보호됩니다.
소프트웨어
Ensenso SDK를 사용하면 로봇 암에 대한 카메라의 hand-eye 캘리브레이션이 가능하고, 로봇 포즈를 사용하여 좌표를 쉽게 변환하거나 움직일 수 있습니다. 또한 내부 카메라 설정을 사용하여 각 이미지 트리거와 같은 전달 시, 현재 상황의 "FileCam"이 기록됩니다. 이것은 예기치 않은 조명 조건, 이미지의 장애물 또는 이미지 내 코일의 예기치 않은 위치와 같은 상황에서 엣지 케이스를 쉽게 조정할 수 있도록 합니다. Ensenso SDK는 또한 평가를 위해 내부 카메라 LOG 파일을 저장하고 보관할 수 있습니다.

ONTEC은 또한 "FileCam"을 사용하여 테스트 사례를 자동으로 확인하므로 비전 소프트웨어를 조정할 때 모든 배열의 올바른 작동을 보장합니다. 또한 ONTEC이 특별히 개발한 제어시스템을 기반으로 다양한 차량을 조율하고 물류 병목 현상을 최소화할 수 있습니다. 매우 제한된 공간에서 서로 다른 어시스턴트가 탐색하고 실행할 수 있습니다. 산업용 인터페이스 도구인 ONTEC SPSComm을 사용하면 표준 산업용 로봇도 전체 어플리케이션에 안전하게 통합할 수 있으며, 서로 다른 시스템 간 데이터 교환이 가능합니다.
전망
자율 주행 차량의 운행 측면에서 시스템의 추가 개발 또한 계획되어 있습니다. "우리의 AGV의 차량 운행과 관련하여 IDS 카메라는 매우 흥미롭습니다. 현재 새로운 Ensenso S 시리즈를 평가하여 차량이 장애물에 훨씬 더 유연하게 반응할 수 있도록 하고 있습니다. 예를 들어 장애물을 분류하고, 장애물 주위를 운전할 수 있습니다." 라고 ONTEC의 소프트웨어 개발자인 Tim Böckel이 다음 개발 단계의 개요를 설명하였습니다.
ONTEC의 자체 인터페이스 구성을 통해 시스템을 다양한 인더스트리 4.0 어플리케이션에 통합할 수 있으며, 자율적으로 움직이는 로봇 솔루션의 모듈식 구조는 다양한 작업에 적용할 수 있는 여지를 남겨둡니다. 이러한 방식으로 생산 및 물류의 효율성과 유연성을 높이는 역할을 할 뿐만 아니라, 많은 곳에서 직원의 업무량을 줄이는 데 기여합니다.

Ensenso 3D 카메라
사용 모델: Ensenso N45

10년 이상의 시간 동안 보도자료와 애플리케이션 보고서를 작성하고, 회사 관련 주제와 기술 제품 커뮤니케이션을 디자인하며 해당 분야의 전문성을 발휘해 왔습니다. 전략적 B2B 커뮤니케이션 경험 덕분에 정확한 메시지를 구성하고, 기술적으로도 탄탄한 콘텐츠를 제공하며, 항상 진정성과 명확성을 중시합니다.
귀하의 프로젝트
프로젝트에 어떤 도움이 필요하신가요? 최적의 솔루션을 함께 찾아드리겠습니다.
Vision Channel
머신 비전 관련 영상 및 라이브 세션
뉴스 레터
최신 정보를 확인하고 IDS 뉴스레터를 구독하세요.
어플리케이션
산업용 카메라가 미래를 어떻게 만들어가고 있는지 알아보세요.