
Ensenso N 시리즈 3D VISION – 정확하고 견고하며 사용이 쉽습니다
GigE 인터페이스
플러그 앤 플레이
CMOS 센서
3D-Vision
나사식 커넥터
PoE (Power-Over-Ethernet)
보호 코드 IP65/67
트리거 & 플래시
경량
사전-보정
소형의 견고한 3D 카메라 시스템
Ensenso N 시리즈는 거친 환경 조건에서의 사용을 위해 특별히 설계되었습니다. 소형 디자인 덕분에 N 시리즈는 로봇 팔의 공간 절약형 정적 어플리케이션 또는 모바일 어플리케이션에서 움직이는 물체와 정적인 물체의 3D 감지에 동일하게 적합합니다. 까다로운 조명 조건에서도 통합 프로젝터는 임의의 도트 패턴이 있는 패턴 마스크를 사용하여 물체에 고대비 텍스처를 투사하여 물체 표면에 존재하지 않거나 약하게만 존재하는 구조를 다듬습니다. 모든 카메라는 사전 보정되어 있어 쉽게 설정할 수 있습니다.

산업 적합성
트리거 및 플래시용 잠금 가능 GPIO 커넥터는 모든 모델을 산업용으로 적합하게 만듭니다. 특히 견고성에 대한 요구가 높은 경우, Ensenso N3x 및 Ensenso N4x D 카메라 시리즈는 IP65/67 보호 등급으로 제공되므로 진흙, 먼지, 물보라 또는 세척제로부터 보호됩니다.
경량의 비용 최적화-N4x 시리즈
새로운 N4x 시리즈의 완전히 분리된 3D 스테레오 전자 장치를 사용하면 경량 플라스틱 복합재를 하우징 재료로 사용할 수 있으므로 3D 카메라 제품군을 보다 비용 효율적으로 제조할 수 있습니다.
감소된 무게로 또한 Ensenso N4x 모델은 협동 로봇 팔에 적용 가능하며, 이 모델의 구동력은 사람을 보호하기 위해 제한됩니다. 플라스틱 표면의 햅틱과 둥근 모서리는 부상을 최소화하는 데 도움이 됩니다.


가장 까다로운 요구 사항을 위한-N3x 시리즈
N3x 모델의 알루미늄 하우징은 전자 부품의 최적 방열을 보장하므로 극한의 환경 조건에서도 안정적인 광 출력을 보장합니다. 이는 3D 데이터의 일관된 고품질 및 견고성을 보장합니다.
금속 구조는 또한 2°~10°의 버전스 각도로 CMOS 센서를 매우 유연하고 견고하게 장착할 수 있게 하여 매우 짧은 오브젝트 거리로 어플리케이션 시나리오를 실현할 수 있습니다.
비교표
N3x |
N4x |
|
|---|---|---|
|
|
|
3D System |
질감이 없는 표면을 캡처하기 위한 "투영된 질감 스테레오 비전"프로세스 |
질감이 없는 표면을 캡처하기 위한 "투영된 질감 스테레오 비전"프로세스 |
CMOS 센서 |
글로벌-셔터, 1936 x 1216 픽셀 (2.3 MP) |
글로벌-셔터, 1936 x 1216 픽셀 (2.3 MP) |
초점 거리 |
6 - 16 mm |
6 - 16 mm |
패턴 프로젝터 |
파란색 (465 nm) 또는 적외선 LED (850 nm) + FlexView 패턴 전환 (N36 만 해당) |
파란색 (465 nm) 또는 적외선 LED (850 nm) + FlexView 패턴 전환 (N46 만 해당) |
작동 거리 |
최소 270 mm |
최소 330 mm |
시야 |
최대 3970 mm |
최대 3970 mm |
인터페이스 |
Gigabit Ethernet |
Gigabit Ethernet |
초당 이미지 |
10 (1.3 MP), 30 (2x 비닝) |
10 (1.3 MP), 30 (2x 비닝) |
전력 공급 |
12V-24V DC/PoE (power over ethernet) |
12V-24V DC/PoE (power over ethernet) |
하우징 |
알루미늄 |
둥근 모서리의 플라스틱 복합재 |
치수 (WxHxD) (커넥터 포함) |
192 x 50 x 52 mm |
193 x 52 x 60 mm |
무게 |
650 g |
550 g |
보호 등급 |
IP65/67 |
IP65/67 |


Z-정확도 또는 XY-해상도와 같은 상세한 모델-특화 값은 3D 카메라 찾기를 통해 찾을 수 있습니다.
어플리케이션
- 3D 물체 인식, 분류 & 측위, 예: 품질 보증, 시운전
- 3D 물체 재구성
- 공장 자동화
- 로봇 어플리케이션, 예: 빈 피킹 또는 공동 작업
- 컨베이어 벨트 장착
- 물류 자동화. 예 : (디)팔렛타이징
- 자동 저장 시스템

TM 플러그&플레이
Ensenso 3D 카메라 N3x 및 Techman Robot에서 "TM 플러그&플레이" 인증을 받은 제품입니다. 사용자들은 이러한 3D 카메라를 TM Robot의 IPC와 연결하여 자체 이미지 프로세싱 어플리케이션을 개발하지 않고도 쉽게 3D 빈피킹 어플리케이션을 사용할 수 있습니다. 이는 귀중한 개발 및 통합 시간을 줄여 줍니다.
MELFA-3D 비전 3.0
Ensenso N3x는 Mitsubishi Electric MELFA-3D 비전 3.0의 표준 3D 비전 카메라로 사용되며, 고유한 모달리스 인식 프로세스로 고속 대량 피킹이 가능합니다. MELFA-3D 비전 3.0은 크기가 작은 부품을 고속 및 높은 측정 정확도로 감지하는 소형 로봇용 3D 비전 센서 소프트웨어입니다.
이는 Ensenso N3x 시리즈에 쉽게 연결 가능합니다. 작은 크기와 가벼운 무게로 유연한 시스템 구성이 가능합니다. 작업 거리와 시야(FOV)를 넓혀 다양한 현장에 적용할 수 있으며, 작은 부품의 정밀 조립 작업에서부터 대형 팔레트의 대량 피킹까지 처리할 수 있습니다.
"자동 보정 기능"은 로봇과 3D 카메라를 자동으로 정렬합니다. 이것은 작업을 훨씬 쉽게 만들어 줍니다.

실무에서의 예시
프로젝트의 계획
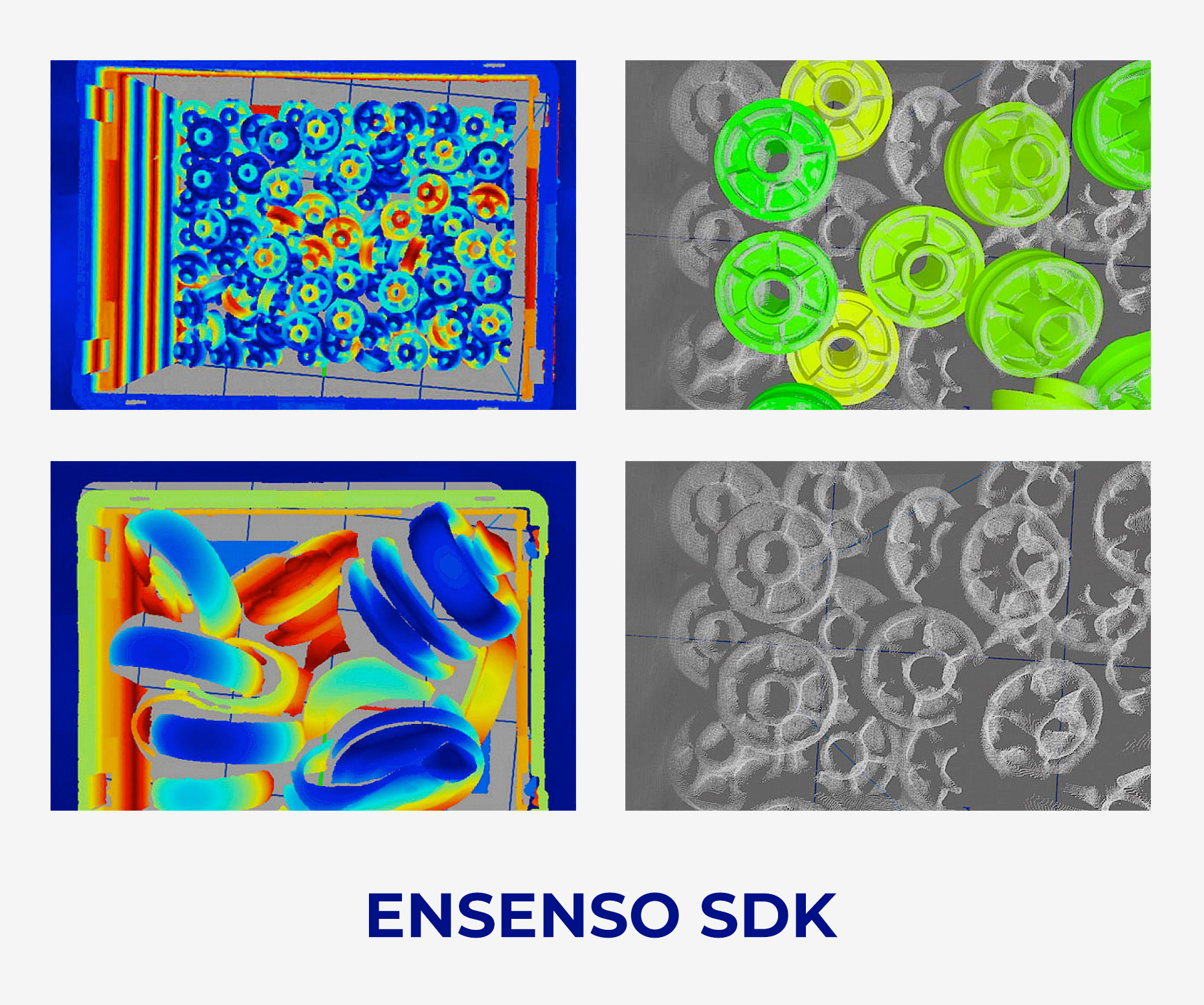
Ensenso SDK
Ensenso N 카메라 모델들은 Ensenso SDK로 쉽게 설정하고 작동시킬 수 있습니다. 3D 카메라에 대한 손쉬운 설정 및 카메라 보정 지원을 위한 마법사 외에도 더 빠른 3D 데이터 처리를 위한 GPU 기반 이미지 처리도 포함됩니다.
- 모든 Ensenso 모델을 위한 하나의 소프트웨어 패키지 (Windows 및 Linux 용 Ensenso SDK)
- 소스 코드가 있는 MVTec HALCON, C, C ++ 및 C# 샘플 프로그램
- 멀티 카메라 모드에서 사용되는 모든 카메라의 데이터로 단일 3D 포인트 클라우드 출력
- 여러 방향에서 3D 포인트 클라우드의 라이브 구성
- 로봇 손-눈 보정
- 예를 들어, 추가 색상 정보 또는 바코드 캡처를 위한 uEye 산업용 카메라의 통합
Ensenso SDK 3.3 출시 이후로, 자신의 CAD geometry에 기초하여 3D 포인트 클라우드에서 물체의 위치를 찾기 위하여 Ensenso PartFinder를 사용할 수도 있습니다. 소프트웨어 모듈을 이용하기 위해 별도의 라이선스가 필요합니다. 영상에서 이 도구를 통해 할 수 있는 것과 어플리케이션에 어떻게 활용 가능한지 확인해 보세요.
Ensenso N 3D카메라에 대한 고객들의 평가
“Ensenso의 3D 기술 덕분에 10 분의 1 밀리미터 이내의 편차를 감지 할 수 있습니다. 이것은 인간의 눈으로 할 수 있는 것보다 낫습니다.”
— Anouar Manders, 소프트웨어 엔지니어 센스IT —